
A journey that began 36 months ago: the HumanTech achievements — in conversation with Jason Rambach
Since setting out on this journey in 2022, we've been working towards a clear mission: to make the construction industry safer, smarter, and greener. Guided by collaboration, innovation, and scientific excellence, we’ve worked over the past 36 months to shape the future of construction through cutting-edge and human-centred technologies.
As our journey officially comes to a close, we are now analysing with our Project Coordinator, Jason Rambach, from DFKI, the incredible progress we’ve made, and the dedication, creativity, and teamwork that’ve brought us here.
Q: Hi Jason! Now that HumanTech is finishing, as Project Coordinator and expert in the field, what do you perceive to be the enduring impact of HumanTech, and how will its outcomes persist in influencing the construction industry in the future?
JR: The impact of HumanTech is already visible: our pilots have shown how automation can improve productivity without compromising human oversight, and how collaborative robotics and wearables can reduce physical strain and improve working conditions in construction.
Over three years, we have brought together robotics, artificial intelligence, wearable systems, and other digital tools, combining the diverse expertise of our 21 partners. This effort resulted in a set of technologies designed to enhance safety, boost efficiency, and support more sustainable building practices throughout the entire construction process.
Our HumanTech technologies and solutions are summarised in the newly released HumanTech brochure, which can be downloaded from the Zenodo community of our project.

With over 20 top-tier peer-reviewed publications and several awards in international technical challenges on AI topics such as Scan-to-BIM automation, HumanTech delivered a strong scientific impact as well.
HumanTech is concluded as a project, but I am convinced that its impact will be long-lasting. Through the Tech4Construction cluster and the ERF Workshop series, a seminal event for AI and Robotics in construction in Europe, our community of partners and collaborators will continue exchanging ideas and working together in future projects.
Clusters of partners from HumanTech will continue their work towards bringing some of the most promising HumanTech technologies to the market. The future of construction technology is now more exciting than ever!
Q: What has been your personal experience in leading the HumanTech project, and what reflections do you have as it draws to a close?
JR: As the coordinator of the Horizon Europe HumanTech project, it has been an extraordinary journey leading a multidisciplinary team across Europe in our shared mission to bring advanced AI and robotics into the heart of the construction industry. What began as an ambitious vision has evolved into a tangible reality, thanks to the dedication, expertise, and collaborative spirit of all our partners.
It was impressive to witness how hard work allowed us to progress from individual research results and components in the areas of construction site automated capturing and understanding, wearables for workers and intelligent collaborative robotics, to five fully integrated pilots in different locations all over Europe and even beyond.
Coordinating such a large and dynamic project has been both a challenge and a privilege. It reinforced my belief in the power of European cooperation and the vital importance of aligning technological progress with societal needs. I am deeply proud of what we have accomplished together and confident that HumanTech will serve as a foundation for future innovations in this sector, where they are much needed. Thank you to every partner who contributed to this effort.
Thank you, Jason, for your insightful final reflections on the HumanTech journey, as well as for your excellent coordination from the proposal phase until the project's final stretch.
It is clear that this ambitious project has not only delivered remarkable technological innovations but also fostered a strong, collaborative partnership committed to reshaping the construction industry. While the project itself has officially ended, its influence will continue to grow through ongoing collaborations, new research initiatives, and the practical deployment of its technologies.
HumanTech stands as a powerful example of how a European-funded project, characterised by visionary thinking, backed by scientific excellence and teamwork, can drive real-world transformation.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!

Building the future: how the Tech4EUConstruction Cluster is revolutionising the construction industry
Imagine a world where construction sites are safer, smarter, and more sustainable. This is no longer a distant dream; it is becoming a reality, thanks to the work performed by a group of European innovation projects known as the Tech4EUConstruction Cluster.
Born out of a shared vision and formalised at the European Robotics Forum (ERF) 2023, the cluster unites cutting-edge EU-funded initiatives, HumanTech, Beeyonders, and RoBétArmé, that are transforming the construction industry with innovative technologies.
After forming the cluster, the founding projects welcomed new members to amplify their reach and impact:
- Reincarnate: Reincarnate is developing a platform that provides information on the life cycle and reuse potential of construction materials and methods to predict and extend product lifetime. Based on its platform data, it is developing and demonstrating 10 innovations.
- Reconmatic: RECONMATIC proposes a set of innovative tools and techniques for managing construction and demolition waste (CDW) throughout the whole life cycle of buildings and infrastructures, addressing European targets for waste and energy consumption reduction in construction.
- InCUBE: InCUBE envisions to unlock the EU renovation wave through cutting-edge standardised and integrated processes based on industrialisation, innovative renewable energy technologies, digitalisation, and new market entrants.
- Bim2Twin: BIM2TWIN aims to provide the construction sector with a breakthrough platform for construction management. An innovative tool based on the Digital Building Twin (DBT) concept, enriched by functionalities related to real-time data collection and end-user applications.
- Heron: HERON aims to develop an integrated and automated system to perform maintenance and upgrade roadworks. It also aims to support visual inspections and dispensing and removing traffic cones in an automated and controlled manner.
Together, these projects form a powerhouse of innovation, with regular meetings and agile coordination ensuring everyone is aligned and moving forward together.
Since the inception of the cluster, the primary objectives have been clearly defined and centred around two key pillars. Firstly, the collaboration aimed to coordinate and implement joint dissemination and communication activities. This included the co-organisation and active participation in high-impact initiatives such as events, webinars, and workshops. These activities enhanced the visibility of individual projects and strengthened the cluster's collective presence within the European construction industry landscape.
Secondly, the exchange and transfer of knowledge, finding common lines of research and potential activities to exploit them, such as the joint questionnaire on Gender inclusion in the construction sector, were also investigated.
European Robotics Forum workshop series
From 2023, the Tech4EUConstruction Cluster took centre stage at the European Robotics Forum with its “AI and Robotics in Construction” workshop series.
These workshops explore the latest project advancements, drawing over 100 participants per year, showcasing real-world solutions.
In the 2024 edition, each project, together with a panel of esteemed experts, shared their knowledge on the benefits of AI and robotics in achieving automation in construction, based on research and development activities.

The 2025 edition also saw the participation of the DISCOVER project. The workshop tackled sustainable construction and deconstruction, discussing the latest advancements of the projects and how intelligent robotics can cut waste and accelerate circular practices.
How technology meets inclusion and sustainability
The cluster’s activities go well beyond technological advancements. They also take into account how to empower inclusion and sustainability in the construction industry. In this sense, the following activities were organised:
InCUBE Webinar
The “Empowering Social Inclusion in Construction” webinar explored how digital tools can break down barriers, especially for women in a historically male-dominated sector. The discussion highlighted how inclusive design and user feedback are crucial for shaping accessible innovations. This webinar highlighted ongoing collaborative efforts across the cluster to ensure that technological advancements in construction contribute to a more inclusive and equitable workforce.
Sustainable Places 2024
The workshop's primary objective was to highlight and present the diverse range of projects currently underway within the cluster, focusing on the innovative technologies being developed. This event was a key opportunity for stakeholders, researchers, and industry participants to gain insights into the technical advancements and collaborative efforts driving the cluster's progress. The workshop represented a significant milestone in the cluster's dissemination and communication strategy, since it was the first occasion where nearly all associated projects were brought together under the same event.
Hannover Messe 2025
Taking our messages to one of the world’s biggest industrial tech fairs, the cluster promoted its vision through brochures, videos, and interactive displays, underlining the EU’s leadership in robotics for construction.
Technology for gender inclusion: A sector survey
At the end of April 2025, the cluster launched a common initiative to assess whether the technologies being developed and tested in the projects can enhance gender inclusion within the construction sector. This effort aims to identify barriers that limit women's participation and explore how emerging technologies can create more equitable opportunities. The questionnaire is available here.
Paving the way for a smarter, inclusive, and sustainable construction future
The Tech4EUConstruction Cluster is a powerful example of how cross-collaboration among innovative EU-funded projects can catalyse transformation within traditional industries.
By uniting diverse technological advancements, from digital twins and AI-powered automation to sustainable material reuse and inclusive workforce strategies, the cluster is redefining what the future of construction looks like.
Its commitment to not only enhancing efficiency and sustainability but also promoting gender inclusion demonstrates a holistic vision for industry evolution. As it continues to grow, share knowledge, and make its presence known across major European events and initiatives, the Tech4EUConstruction Cluster is well on its way to building a smarter, safer, and more inclusive construction ecosystem for Europe and beyond.
Follow our hashtag #Tech4EUconstruction to stay tuned to the cluster’s latest activities and news!

HumanTech at ERF2025: Workshop on Robotics in Sustainable Construction and Deconstruction
From 25–27 March 2025, HumanTech participated in the European Robotics Forum (ERF) in Stuttgart, where we co-organised a dedicated workshop on applying robotics in efficient and sustainable construction and deconstruction. This marked our third consecutive year participating in this key European event for robotics and innovation.
As in previous years, the European Robotics Forum offered an exciting opportunity to connect with industry leaders, explore the latest advancements in robotics across different fields, and gain fresh insights from inspiring talks. The event gathered leading figures from academia, industry, and policy. This year’s theme, “Boosting the Synergies between Robotics and AI for a Stronger Europe”, highlighted the role of AI-driven robotics in fostering innovation and societal progress.
Workshop: Application of robotics in efficient and sustainable construction and deconstruction
Our workshop — hosted in collaboration with our Tech4EUConstruction cluster sister projects, BEEYONDERS and RoBétArmé, as well as the DISCOVER project — brought together top experts to discuss the latest advancements in the use of robotics in the construction and circularity domains.
Attendees had the opportunity to learn from the latest innovations in construction automation, digital twin technology, and material identification within the circular economy framework. The session was structured around real-world case studies and shared experiences to foster collaborative insights and a roadmap for future developments.
Workshop organisers and speakers:
- Jason Rambach, HumanTech coordinator — DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz)
- Antonio Alonso Cepeda, BEEYONDERS coordinator — ACCIONA Construction
- Dimitrios Giakoumis, RoBétArmé coordinator — CERTH, ITI / OZZIE Robotics
- Lluís Bonet Ortuño, DISCOVER project — CDEI-UPC
- Fabian Kaufmann, RPTU Kaiserslautern-Landau, HumanTech, who presented the HumanTech Pilots implementation and results
- Goretti Arias Ferreiro, Fundación Agustín de Betancourt / ACCIONA Construction, BEEYONDERS
- Christian Di Natali, ITI (Istituto Italiano di Tecnologia), BEEYONDERS
- Francisco Javier Pérez Grau, Fundación Andaluza para el Desarrollo Aeroespacial, BEEYONDERS
- Franc Mouwen, EIC (European Innovation Council)
The session brought together a wide audience, from researchers and technologists to industrial players and policy experts.
Special thanks to the HumanTech team on-site and our partners for their great collaboration during the event!
Stay tuned as we highlight our progress in making the construction sector safer, more efficient, and more sustainable through human-centred technologies.

HumanTech Pilots: Dynamic sematic digital twin
From 10 to 13 March 2025, HumanTech team partners from research institutes, SMES, and construction companies gathered at the Department of Biomedicine of the University of Basel construction site to evaluate one of the use cases of our dynamic semantic digital twin system. This technology contributes to our broader mission to digitalise the construction sector, enhancing safety and improving efficiency.
Read the insights from the team involved in this pilot's development:
Applying BIMxD and scan-to-BIM in real-world scenarios
Fabian Kaufmann, Researcher at RPTU
The main objective of this pilot — one of our five HumanTech Pilots — is to demonstrate and validate HumanTech solutions related to BIMxD and scan-to-BIM in real-world applications. This includes five use cases:
- Construction progress monitoring
- Construction site item localisation
- Falling hazard identification using an interactive augmented user interface
- Detection of blocked emergency exits
- Scan-to-BIM to provide an as-is model of the project
Key milestones include the development of technical components such as a 360-degree depth camera and automated unmanned aerial vehicle (UAV) and unmanned ground vehicle (UGV) scanning pipelines for efficient data capture, segmentation models, scan-to-BIM reconstruction algorithms, and open BIM authoring tools. During the pilot implementation, each component was integrated to deliver the corresponding use case.
"The main objective of this pilot is to demonstrate and validate HumanTech solutions related to BIMxD and scan-to-BIM in real-world applications."
Turning point clouds into actionable insights
Sebastian Mattes, Reality Capturing Specialist at Implenia
In this pilot, we explored how point clouds can be used effectively on construction sites, with a focus on two key areas: safety and productivity.
We employed different technologies to capture the data: a laser scanner, a drone, and a 360-degree camera with depth-measurement. By using reference markers, we could align these datasets, compare their accuracy, and overlay them with a digital model.
Capturing the point clouds is actually the smallest part; the real challenge lies in processing the data and extracting meaningful information from millions of points.
"Capturing the point clouds is actually the smallest part; the real challenge lies in processing the data and extracting meaningful information from millions of points."
On the safety side, we aimed to detect and visualise falling hazards and ensure that emergency exits were unobstructed. From a productivity perspective, we developed a pipeline to generate a model from the point cloud, track the building progress, and identify materials or objects present on-site.
https://www.youtube.com/watch?v=1v897czNIYo
Hololight’s XR solution for the falling hazards detection use case
Harsh Manoj Shah, Technical Project Manager at Hololight

As part of the use case focused on detecting falling hazards, we at Hololight developed an XR-based BIM visualisation system called BIMSpace XR. It is a mixed reality application that enables real-time, true-to-scale visualisation of high-quality BIM models directly on construction sites. Using industry-standard markers, the system ensures precise alignment between the digital model and physical structures, giving construction professionals an immersive and interactive way to inspect safety-critical elements.
"The BIMSpace XR solution gives construction professionals an immersive and interactive way to inspect safety-critical elements directly on-site."
The BIMSpace XR application is integrated with Hololight Stream, a remote rendering solution that enables real-time streaming of augmented reality (AR) and virtual reality (VR) applications from powerful servers to the Microsoft HoloLens 2 XR device. The solution also supports real-time issue tracking through the BIM Collaboration Format (BCF), allowing users to detect, annotate, and resolve design deviations, safety hazards, or construction errors on-site. These issues are synchronised with BIM collaboration platforms like Catenda Hub, enabling seamless project coordination and communication across teams.
In addition to progress tracking by comparing as-planned and as-built conditions, the solution can extend to MEP reviews, virtual safety training, and multi-user collaborative sessions, offering interactive and scenario-based learning experiences on-site.

Detection of blocked emergency exits using BIM and point cloud analysis
Marius Schellen, Reasearcher at RPTU
This use case focuses on improving safety on active construction sites and operational buildings by detecting blocked emergency exits in real time. Leveraging a detailed BIM model — either of a building under construction or in use — all doors marked as emergency exits (with the fire exit property set to true) are identified. From these, the system derives the required emergency corridors that must remain clear at all times to comply with safety regulations.
Using HumanTech’s advanced technologies, an up-to-date point cloud of the site or specific area is analysed. Points falling within the defined emergency corridors are examined to detect potential obstructions. A rule-based system then determines whether any objects actually block the escape path, ensuring that a minimum width is maintained for safe evacuation.
"Using HumanTech’s advanced technologies, emergency exits can be monitored in real time — helping teams resolve safety hazards quickly and efficiently."
This functionality is fully integrated into the HumanTech BIMxD backend. Through a browser-based interface, users can upload or select an IFC model along with the corresponding point cloud to automatically detect obstructions with just a few clicks.
If an issue is found, a BIM Collaboration Format (BCF) report is automatically generated. This report can include attachments, instructions, or notes, and is assigned to the relevant project personnel, helping teams resolve safety hazards quickly and efficiently.
Item localisation with 360-degree 3D scanner
Hideaki Kanayama, R&D Engineer at RICOH
As part of this pilot, we conducted a field demonstration of our newly developed 360-degree one-shot 3D scanner at a construction site and applied it to the use case focused on construction site item localisation. High-speed scanning in the field is crucial to reduce the effort required to capture images while minimising disruption to site activities.
To compare the design BIM model and 3D scans, we developed a pipeline that aligns the scanned data with BIM using AR markers as reference points. This allows for visualising progress changes in comparison to the BIM model.
We also developed a data preprocessing pipeline to facilitate item localisation using Open-Vocabulary Segmentation, a technology developed by DFKI. Since conventional AI models often struggle with 360-degree imagery, we converted these images into a format more compatible with existing models — significantly improving their performance.

Enabling dynamic semantic digital twins through automated data capture
Michael Peter, Patipol Thanuphol, Researcher at ZHAW
As part of this pilot, ZHAW developed and integrated an automated data acquisition system designed to support the creation of Dynamic Semantic Digital Twins (DSDT) in construction. The system coordinates drones, robots, and handheld scanning workflows, enabling efficient, minimally disruptive data collection throughout the construction lifecycle.
"We developed an automated data acquisition system that coordinates drones, robots, and handheld scanners — enabling efficient, minimally disruptive data collection throughout the construction lifecycle."
Capture requests are initiated and managed through BIM-based inputs, and the collected data is automatically processed, aligned, and integrated using a unified backend. A key innovation is the standardised marker system, which ensures accurate spatial referencing across different capture sessions and devices. Surveyed markers are paired with detectable visual targets, and their detection and transformation are automated within the pipeline.
The system also provides recommended marker information to project partners, simplifying downstream processing and dataset merging. These developments enable high-quality, consistent, and scalable 3D data capture — supporting use cases such as progress tracking, safety monitoring, and automated as-built model generation.
Bringing the end-user perspective
Patricia Rosen, Researcher at BAuA
Like in other HumanTech pilots, our focus in this pilot was to include the end-user perspective in the technology development process to obtain valuable feedback on the current system status, but also to gain insights on potential risks and benefits for occupational safety and health (OSH) from the users’ perspective. We collected feedback on different usability-related aspects from nine potential end-users.
"Like in other HumanTech pilots, our focus in this pilot was to include the end-user perspective in the technology development process to obtain valuable feedback."
We mainly focused on the use case for falling hazard detection, given its clear link to OSH concerns. Even though technology maturity has not yet reached its full potential, most users see strong benefits related to different efficiency aspects. However, further adaptation will be necessary to ensure an overall safe operation.
This pilot has demonstrated how emerging technologies can be integrated into practical workflows to improve safety, efficiency, and collaboration on construction sites. From automated data capture and falling hazard detection to real-time BIM visualisation and item localisation, the combined efforts of the HumanTech partners show the transformative potential of digital solutions when developed with end-users in mind.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!
HumanTech Pilots: Bridge inspection and monitoring
Between June 2023 and February 2025, HumanTech partners from different organisations gathered at a highway bridge in Kleinandelfingen, Switzerland, to test our semi-autonomous system for bridge inspection and monitoring. This pilot is part of our broader ambition to digitalise the construction sector — enhancing safety, efficiency, and sustainability through innovative technologies.
Our goal was to identify an affordable drone system with maximum technological support to simplify bridge inspections — crucial for maintaining ageing infrastructure and addressing the growing shortage of skilled inspectors and experienced drone pilots. With this in mind, we aimed to create a best practice demonstrating how future inspections and analyses could be conducted.
This pilot — one of our five HumanTech Pilots — represents an important step toward digitalising inspection processes through robotics, paving the way for more efficient and AI-supported methods in construction monitoring.
Read the insights from the team behind its development:
https://www.youtube.com/watch?v=LpP4lN7UdiM&t=59s
How HumanTech is digitalising bridge inspections
Sebastian Mattes, Reality Capturing Specialist at Implenia
As part of the HumanTech project at Implenia, we are focusing on bridge inspections. Our ageing infrastructure — particularly bridges — needs more and more attention. At the same time, we face a shortage of skilled labour, as many experienced inspectors are reaching retirement age.
To reduce the workload and improve efficiency, we have developed a best practice that combines drones and AI in a digital system, enabling semi-autonomous inspection and evaluation.
The system allows for the overlay of previous inspection data, making it possible to accurately track changes in cracks over time. This process is designed to support and enhance the work of human inspectors.
"To reduce the workload and improve efficiency, we have developed a best practice that combines drones and AI in a digital system, enabling semi-autonomous inspection and evaluation."
Custom drone technology for precision infrastructure monitoring
Michael Peter, Patipol Thanuphol, Research Associate at ZHAW

The Control Systems Group at the Institute of Mechatronic Systems (ZHAW) has developed a companion system for the DJI Mavic 3E drone, designed to overcome the challenge of capturing images underneath the bridges where GNSS signals are unavailable.
Traditionally, photogrammetry in these environments has required manual piloting, but ZHAW’s system leverages drone-based visual SLAM to enable stable positioning, making operations more reliable and significantly reducing the burden on the pilot.
The custom hardware setup includes a high-resolution camera with flash, a microcontroller with Bluetooth and Wi-Fi, laser pointers for field-of-view indication, and a receiver for remote triggering. This solution extends the capabilities of state-of-the-art commercial drone technology, allowing for capturing perpendicular images, regardless of camera orientation, even under challenging conditions.
"This solution extends state-of-the-art commercial drone technology to capture perpendicular images, regardless of camera orientation, under difficult conditions."

As a proof of concept, the system demonstrates that high-quality results can be achieved without advanced piloting skills, highlighting ZHAW’s expertise in merging advanced control systems with accessible commercial platforms. Beyond solving current challenges, this development also opens the door to future autonomous solutions for infrastructure inspection.
AI-powered 3D modelling and defect detection for structural inspections
Jo Luick, Project Lead at STRUCINSPECT
STRUCINSPECT specialises in advanced structural inspection solutions, leveraging cutting-edge technology to help ensure the safety and longevity of critical infrastructure.

In HumanTech, we used photogrammetric processes to create a precise 3D replica of a bridge by analysing images captured by two different data acquisition systems. The process included georeferencing and scaling to ensure accuracy, resulting in two 3D models that allowed for a detailed comparison.
We then applied automated AI-driven defect detection to identify structural issues such as cracks, spallings, exposed reinforcements, corrosion, and efflorescence. These detected defects were mapped onto the 3D model and exported in the Industry Foundation Classes (IFC) format, creating a comprehensive digital representation of the bridge’s condition.

This method not only improves the accuracy of structural assessments but also streamlines the inspection workflow, making defect documentation more efficient. Integrating AI and photogrammetry marks a significant advancement in structural inspection practices.
"This method not only improves the accuracy of structural assessments but also streamlines the inspection workflow, making defect documentation more efficient."
Turning bridge data into digital models
Marius Schellen, Researcher at RPTU
In addition to overseeing the progress of this pilot, RPTU was responsible for coordinating its development and implementation. On the technical side, RPTU provided an approach for BIM reconstruction based on the scanned data. To support this, results from previous research were adapted and applied to explore methods for semantic segmentation and scan-to-BIM reconstruction. A demonstration of the BIM reconstruction will be included as part of the pilot. However, further development is needed to fully automate the process.
This pilot demonstrates how innovation across disciplines can transform infrastructure inspection. By addressing real-world challenges, HumanTech is paving the way for smarter, safer and more sustainable construction practices. The results from this pilot not only showcase the potential of semi-autonomous systems today, but also lay the groundwork for future fully automated solutions.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!

HumanTech Pilots: Robotics and wearables for collaborative bricklaying
Between 13 and 31 January 2025, HumanTech project partners gathered at ACCIONA Construction's demo site in Madrid to integrate and test our robotics and wearables system for collaborative bricklaying. This is one of the technologies we have developed as part of our broader mission to digitalise the construction sector and make it safer and more efficient.
The goal for this session was to demonstrate two innovative technologies for assisting bricklayers at construction sites:
- An active exoskeleton that supports workers during heavy lifting, particularly at or above shoulder height.
- A robotic brick-handover system that can detect and grasp bricks from a stack and hand them to the worker.
This pilot — one of our five HumanTech Pilots — represents a key milestone in our efforts to enhance safety and efficiency in construction processes through human-robot collaboration, setting the stage for a smarter and more ergonomic approach to bricklaying.
Explore insights from the team behind its development:
The pilot's main objective
Fabian Kaufmann, Researcher at RPTU
The human workforce will be present on construction sites at least in the mid-term, and likely even in the long-term. Therefore, robotic systems must be able to co-exist with humans on-site. This pilot aims to demonstrate human–robot collaboration enabled by advanced perception and control algorithms. In an integrated bricklaying scenario, our robot hands over bricks, picked up from a pallet, to the worker, and the worker is supported by an on-demand activated exoskeleton to assist with physically demanding tasks.
"This pilot aims to demonstrate human–robot collaboration enabled by advanced perception and control algorithms."
https://www.youtube.com/watch?v=03h0T0rUNOs
Transforming Bricklaying: How Technology is Empowering Workers
Anurag Bansal, Head of Strategic Innovations at ACCIONA
This pilot could be a game-changer for the industry. As a construction company committed to innovation, we were excited to see HumanTech’s robotics and wearables system for collaborative bricklaying in action at Acciona. These technologies have the potential to transform the way we work — making construction safer, more efficient, and sustainable.
The active exoskeleton provided much-needed support for workers lifting heavy materials at or above shoulder height, reducing strain and fatigue. Meanwhile, the robotic brick handover system seamlessly detected, grasped, and passed bricks to workers, improving workflow and minimising downtime.
Seeing these solutions firsthand reinforced the idea that automation isn’t about replacing workers — it’s about empowering them. If widely adopted, this technology could revolutionise construction sites, enhancing productivity while prioritising worker well-being. This is a major step towards a smarter, safer future for the industry.
"If widely adopted, this technology could revolutionise construction sites, enhancing productivity while prioritising worker well-being."
Gabor Sziebig, Research Manager at SINTEF
Statistics and analyses show that the construction industry faces many challenges: slow adoption of new technologies, high injury rates, low productivity, and a decline in recruiting skilled workers. I believe construction sites will change significantly in the coming years.
Looking five years ahead, I think the most modern construction sites will be adapted for robots. Initially, it is natural to imagine them operating on site when human workers are not present. If humans work two shifts, robots can take the third. It will begin with simple tasks — robots that paint or transport materials already exist, and Norwegian companies are already using drilling robots. Robots inspecting the construction site during off-hours is also easy to envision.
Over time, robots will increasingly work alongside construction workers and engineers on-site, as we have demonstrated in this pilot.
"Over time, robots will increasingly work alongside construction workers and engineers on-site, as we have demonstrated in this pilot."
Use case 1: Robotic collaboration for brick handover
Brick pose estimation and best candidate selection
Sai Srinivas Jeevanandam, Computer Vision Researcher at DFKI
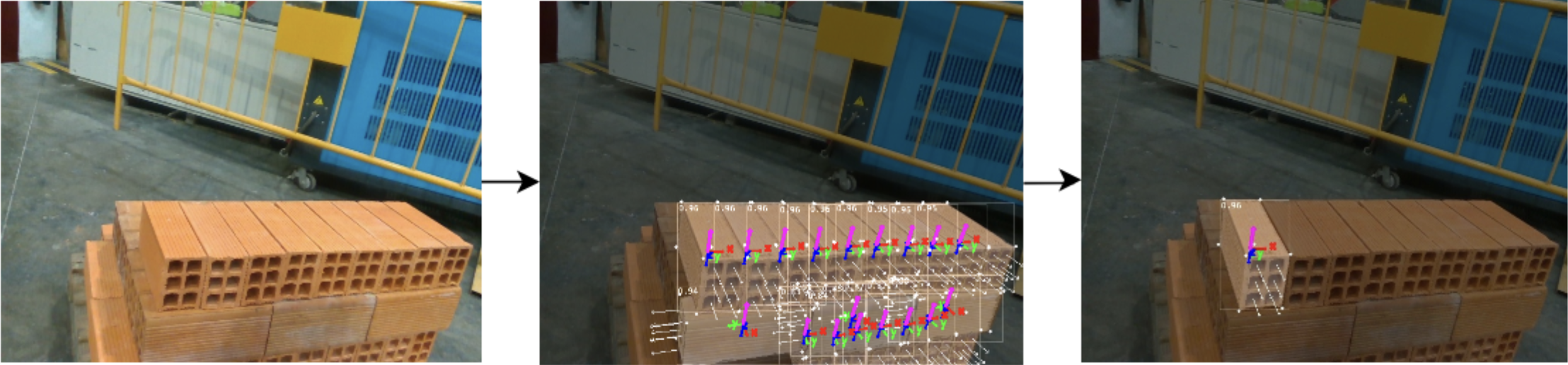
For the robot to effectively pick up bricks, it must understand two critical aspects: (1) the poses of the bricks — including their precise location and orientation in the environment — and (2) which brick to select for grasping. We at DFKI have developed ZebraPose, a state-of-the-art, in-house deep learning algorithm designed to predict poses directly from a single image.
Recognising the novelty of this task and the limited availability of relevant real-world data, we created a synthetic dataset consisting of rendered images of brick stacks. These synthetic images were specifically designed to replicate real-world brick arrangements. We used this dataset to train our deep learning model, enabling it to predict brick poses accurately. By leveraging synthetic data, we eliminated the need for time-consuming and error-prone manual annotation, significantly accelerating the model development process.
In addition to pose estimation, we developed a robust best-candidate selection algorithm. Given the poses of all bricks in a stack, this algorithm evaluates each one and selects the most suitable candidate for the robot to grasp.
Finally, we packaged everything into an end-to-end pipeline with an API interface for easy integration. This pipeline is designed to operate in real time, making it suitable for deployment on edge devices such as the NVIDIA Jetson, where computational resources are limited.
Mobile robotic system
Joseph Thomas Thekkekara, Technical Project Manager at BAUBOT
BAUBOT provided a collaborative mobile demonstrator platform based on a modular concept, built from scratch for HumanTech. This system can support a wide range of external robotic applications, particularly those related to the construction industry.
It was designed with external software and hardware interfaces to facilitate the integration of external robotic applications into the existing robotic architecture.
https://www.youtube.com/watch?v=jdzQBCzLsxo
Use case 2: Wearables for supported bricklaying
Intelligent exoskeleton with intention prediction
Alfonso Domínguez, Senior Researcher at Tecnalia

Within the HumanTech project, Tecnalia has introduced the first prototype of an advanced upper-limb exoskeleton. The decision to focus on the upper limbs stems from the fact that shoulders, along with the back, are among the most affected body regions in construction due to the physically demanding nature of the work.
What makes this exoskeleton unique is its ability to activate based on the user’s intent, inferred from their kinematics using data from a Body Sensor Network (BSN). Its main goal is to reduce physical strain and minimise effort for the worker, while providing a more intuitive and less intrusive user experience. By simplifying its operation, the system also reduces the mental effort needed to control the exoskeleton, making it a seamless extension of the worker’s natural movements.
"What makes this exoskeleton unique is its ability to activate based on the user’s intent, inferred from their kinematics using data from a Body Sensor Network (BSN)."
Mobile magnetometer-free inertial tracking
Markus Miezal, CEO and Co-Founder of Sci-track
As support for the exoskeleton, Sci-track provides its magnetometer-free inertial tracking approach, executed on-body using a Xenoma e-skin suit. The suit features very flat IMUs integrated into a tight full-body suit that can be comfortably worn beneath protective clothing.
Usually, inertial sensors include a magnetometer — a 3D compass used to measure the local magnetic field and determine yaw direction. While this sensor is designed to point towards magnetic north, it can easily be disrupted. Metal structures, power tools, and motors — all common on construction sites — influence the Earth’s magnetic field locally, resulting in inaccurate readings. Our approach eliminates the use of magnetometers, relying instead on motion-based intrinsic alignment.
Additionally, our algorithms can run on a body-worn, mobile phone-sized computer. This ensures timely communication with the exoskeleton and enhances privacy, as the data never leaves the wearer.
https://www.youtube.com/watch?v=0pdJqjwoEa4&feature=youtu.be
This pilot showcases how human-robot collaboration can transform physically demanding construction tasks into safer, more efficient, and more sustainable processes. By combining robotics, wearables, and intelligent algorithms, HumanTech is paving the way for a more resilient and future-ready construction industry.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!

HumanTech Pilots: BIMxD-based autonomous robotic task planning
In December 2024, HumanTech partners gathered at RPTU Kaiserslautern’s demo centre for a hands-on demonstration and final implementation of one of the project's innovative pilot projects: BIMxD-based autonomous robotic task planning. This session marked a significant milestone in our collaborative journey to revolutionise the construction industry with advanced robotics and digital tools.
This pilot aims to showcase how cutting-edge technologies like our BIMxD platform and robotic systems can transform traditional construction processes by introducing automation and precision, enabling more efficient and streamlined operations.
Professionals across the HumanTech team share their insights in this article, detailing this groundbreaking pilot's technologies and outcomes.

Introduction to the pilot and demo session
Jason Rambach, HumanTech’s Project Coordinator and Senior Researcher and Team Leader at DFKI
This pilot aims to demonstrate the potential of fully digitalised construction sites in enabling robotic automation. BIMxD, the digital twin platform we developed at HumanTech, is used as an interface for remotely planning robotic tasks, in this case by our partner Kajima in Singapore. The planned task information is then transmitted and converted into robotic navigation and task execution by our BAUBOT robotic platform, along with other technologies developed at HumanTech.
This pilot is a key example of successful partner collaboration in HumanTech, integrating components created by different partners. These include RPTU (scan-to-BIM and autonomous navigation), CATENDA (BIMxD platform), STAM (ontology for robotic demolition task), SINTEF (robotic end-effector), BAUBOT (robotic platform), RICOH (surround-view streaming with spherical camera), and KAJIMA (end-user).
"This pilot aims to demonstrate the potential of fully digitalised construction sites in enabling robotic automation."
https://www.youtube.com/watch?v=TXtGg97KQdg&list=PLLFSbOsrWIuaVm5-kJQuKvh6bgsbJHcrH&index=7
Overview of the pilot objectives and test site
Marius Schellen, Researcher at RPTU

The objective of this pilot is twofold: On the one hand, the interface of the BIMxD platform and robotic control is being demonstrated. On the other hand, the autonomous robotic navigation and marking, based solely on the BIM model without any markers, is being implemented and demonstrated.
To this end, a dedicated test building was erected to suit the scenario and the HumanTech robotic platform. The test building spans an area of 90m2, with doors and windows offering distinct features for the robot’s localization.
Beyond the physical implementation, the BIMxD interface was set up by Catenda, and the Robotics Research Lab of RPTU implemented the interface and robot controller for the scenario. SINTEF contributed to the pilot by providing the marking end-effector.
Livestream of the session
Hideaki Kanayama, Researcher at RICOH
RICOH offers a service platform, Ricoh Remote Field, designed to support on-site work and remote monitoring through 360° video streaming. This platform enables high-quality, low-latency video streaming with a full 360° field of view. The setup is straightforward, requiring only a single THETA camera and a wireless network connection. The system can be accessed from anywhere via a PC, smartphone, or tablet.
In this pilot, the THETA cameras were mounted on our robotic platform and a wall at the demo site. The video streaming system allowed a remote operator in Singapore to visually monitor the site in Germany (explained below), verify the robot's path planning, and check for any anomalies in the environment.
BIMxD interface
Torvald Andresen, Catenda
We have developed BIMxD, an in-browser interface for inputting data to the task planner. It allows for uploading a 3D model of the worksite, which it shows in an integrated model viewer. A user may draw up expected key points in the model, and relevant data like BIM coordinates, GUIDs (globally unique identifiers), and selected sides of relevant objects are further communicated to the task planner. Authorised users can interact with the model and highlight key points remotely. These points are used to generate the robot movement plan.
The interface is multipurpose and used in several places in HumanTech. This specific model viewer allows other relevant features, like seeing several models of the site and highlighting issues to be addressed in the same view.
Task planner and demolition ontology
Francesca Canale, Project Engineer at STAM
We have developed a task planner to enable the system to plan the robotic actions needed to execute demolition activities autonomously. Powered by a structured demolition ontology, the system understands both the environment and the impact of each demolition action. This ontology extends the ifcOWL framework, adding new classes like "Robot," "Tool," and "Opening," allowing the task planner to match robots with the right tools for each job. Acting as a bridge between user input, the BIM model, and the robots, the task planner ensures efficient and precise execution of demolition activities.
Path planning and autonomous navigation
Maximilian Kunz and Jörg Husemann, Researchers at RPTU
We utilise information from a BIM model for localisation and autonomous navigation of the robot. To localise within the building, we use a LiDAR scanner and compare the detected walls with the walls in the BIM model. By doing so, we can detect our current room based on the structure we scanned and our position within the room without the need to place markers or additional sensors in the environment. A map is created from the navigation model. Then, a path to the target position is planned based on this map. Finally, the platform drives the calculated path while checking its location based on its odometry and the scans of the LiDAR scanner.
https://www.youtube.com/watch?v=ucHGMGu7rtU&list=PLLFSbOsrWIuaVm5-kJQuKvh6bgsbJHcrH&index=6
Robotic platform
Joseph Thomas Thekkekara, Technical Project Manager at BAUBOT
Baubot provided a collaborative mobile demonstrator platform based on a modular concept built from scratch for HumanTech. The mobile robotic system can serve as a platform for a wide range of external robotic applications, particularly those relating to the construction industry.
The system was built with external software and hardware interfaces that facilitate the integration of external robot applications into the existing robotic architecture. The marking tool developed by SINTEF, the autonomous navigation system provided by RPTU, and the Task Planner developed by STAM were integrated into the pipeline to enable the Baubot robotic system to perform the indented task.
Marking tool
Gabor Sziebig, Research Manager at SINTEF
The marking tool is a small and compact way to highlight the task of the collaborative mobile demonstrator platform. The housing is made by rapid prototyping, and the electronics are adapted to the requirements of the platform: power source and communication with the overall control system of the platform. The marking tool holds a classic whiteboard marker pen and can be easily replaced. A sensor is also integrated into the housing, which detects contact with any surface by the marker pen.

Remote task planning from Singapore and end-user perspective
Rongbo HU, Researcher at Kajima Corporation
In this demonstration, engineers from the Kajima Technical Research Institute Singapore (KaTRIS) set up a station consisting of two terminals in a Construction Robotics Lab, each with a screen to command the robot remotely from Singapore.
On the left screen, videos were streamed live from the Ricoh camera installed inside the testing room in Kaiserslautern. This allowed Kajima engineers in Singapore to observe the surroundings and make informed decisions. On the right screen, there was a digital twin of the testing cell embedded in the web application for the engineers to send commands to the robot. Using the digital twin, Kajima engineers first studied the environment from the camera's live feed, followed by clicking the corresponding wall inside the digital twin to perform autonomous robotic drilling.
As the end user of this technology, Kajima Corporation is able to study the implications and benefits of remote control of autonomous robots. By incorporating remote operation into future workflow, manpower can be shared between Kajima’s offices worldwide. Engineers no longer have to frequently travel to sites to perform specific tasks and workers can dynamically operate from a safer environment. More importantly, as construction robotics solutions incorporate such features, human intelligence can come in remotely to resolve tasks that are too complicated for robots, thus filling the gap. This can potentially be a game changer in how we build.

This BIMxD-based autonomous robotic task planning pilot exemplifies HumanTech’s vision of integrating digitalisation, automation, and collaboration to advance the construction industry. By leveraging the expertise and innovations of multiple partners, this pilot demonstrated the feasibility and potential of fully digitalised construction workflows, from remote task planning to autonomous robotic execution.
As we move forward, the insights gained from this pilot will be instrumental in refining our technologies for broader adoption across the industry. Upcoming demonstration sessions in Madrid and Switzerland will further validate our solutions' scalability and real-world application, bringing us closer to shaping a smarter, more efficient, and sustainable construction future.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!

HumanTech Train the Trainer webinar
Save the date! Calling all trainers to join us on December 9th 2024, to explore our latest materials designed to teach cutting-edge skills related to our innovations in the construction sector.
Our partners at the TUS Sustainable Development Research Institute (SDRI) have developed new micro-learning units for use in Higher Education, Vocational Education and Training (VET), and Continuing Professional Development (CPD).
Don't miss this opportunity to update your training toolkit!
🗓️ December 9th
⏰ 3:30 PM - 4:30 PM (GMT+1)
📩 Learn more and register now

30 must-read publications on digital and circular building
The European construction industry is facing significant challenges in sustainability, innovation adoption, and labour shortages, with almost half of its jobs in short supply. However, by accelerating the sector's digital and green transformation, we can significantly improve its competitiveness and resource efficiency and appeal to a new generation of highly skilled workers, thereby creating a more innovative, sustainable, and attractive industry.
At HumanTech, we have joined forces with seven other European-funded projects addressing these challenges in the Tech4EUConstruction cluster. In this article, we share 30 of our scientific publications, providing new insights into the scientific foundation of our project's innovations for researchers and industry professionals.
The science behind the Tech4EUConstruction cluster’s innovations
At the Tech4EUConstruction cluster, we aim to create a lasting impact by exchanging our expertise and technical innovations. This article explores the science behind the groundbreaking innovations we are developing in areas such as building renovation, sustainability monitoring, digital innovation technologies, energy efficiency, renewable energy, and materials & design.
What advancements in AI and robotics will shape the future of the construction industry? Check out the articles below to find out!
Topic 1: Building renovation and sustainability monitoring

1. Monitoring the sustainability of building renovation projects — A tailored Key Performance Indicator repository
This publication, developed by the InCUBE project, aims to assist in identifying suitable key performance indicators (KPIs) that can be used to assess the sustainability performance of buildings as they transition into zero-carbon, resource-efficient, and resilient structures.
2. Towards the digitalization and automation of circular and sustainable construction and demolition waste management – project RECONMATIC
This publication presents Reconmatic, a Horizon Europe Research and Innovation Action project that aims to develop novel tools, technologies, and methodologies that can contribute to multiple construction phases and project types or material and product life cycle stages.
3. Assessing the construction and demolition waste volume for a typical Mediterranean residential building
Released by Reconmatic, this study estimates the construction and demolition waste (CDW) produced by a typical multi-storey residential building in Greece, built in the mid-20th century, made of reinforced concrete and filling masonry walls. It also considers renovation procedures and presents challenges related to the disposal, recycling, and reuse potential of CDW types.
Topic 2: Digital innovation technology

4. From 3D surveying data to BIM to BEM: The InCUBE dataset
This paper introduces the InCUBE dataset, resulting from the project's activities, focused on unlocking the EU building renovation through integrated strategies and processes for efficient built-environment management (including the use of innovative renewable energy technologies and digitalisation). The dataset contains raw and processed data from an Italian demo site in Trento's Santa Chiara district, enabling multiple potential uses, investigations, and developments.
5. Introducing Noise for AirSim’s 3D LiDAR Sensor to Reduce the Sim2real Gap
In robotics, modeling sensor noise is important as it can affect the accuracy and reliability of a robot’s perception of its environment. It also allows for more accurate simulations of robotic systems, which can help improve their performance in real-world scenarios. The Beeyonders’ project proposes introducing a noise model for the 3D LiDAR (Light Detection and Ranging) sensor supported in AirSim to help the community develop more accurate, reliable, and cost-effective solutions.
6. Online Ergonomic Evaluation in Realistic Manual Material Handling Task: Proof of Concept
Work-related musculoskeletal disorders are a major cause of work-related injuries. To address this issue, work task ergonomic risk indices have been developed, but they are subjective and challenging to perform in real time. This work, released by Beeyonders, provides a technique to digitalize this process by developing an online algorithm to calculate the NIOSH index using inertial sensors, which can be easily integrated into the industrial environment.
7. REINCARNATE: Shaping a sustainable future in construction through digital innovation
The heart of the Reincarnate project is the Circular Potential Information Model (CP-IM), a digital platform designed to assess and enhance the recyclability of construction materials, products, and buildings. The CP-IM utilizes advanced technologies to revolutionize the handling of construction waste, turning it into valuable resources and reducing the sector's environmental footprint. Its features include digital tracing, material durability predictions, and CO2 reduction materials design, showcased in eleven European demonstration projects, highlighting significant reductions in construction waste and CO2 emissions.
8. Presenting SLAMD – A Sequential Learning Based Software for the Inverse Design of Sustainable Cementitious Materials
The composition of concrete has become more complex, especially with formulations aimed at reducing carbon footprint. Inverse Design techniques offer a solution by allowing for a comprehensive search to create new and improved concrete formulations. This publication introduces the concept of Inverse Design and demonstrates how an open-source app called SLAMD, developed by Reincarnate, provides necessary workflow steps to adapt it in the laboratory, lowering the barriers to its application.
9. Single Frame Semantic Segmentation Using Multi-Modal Spherical Images
In recent years, the research community has shown much interest in panoramic images that offer a 360º directional perspective. Multiple data modalities can be fed, and complementary characteristics can be utilised for more robust and rich scene interpretation based on semantic segmentation. In this study, HumanTech proposes a transformer-based cross-modal fusion architecture to bridge the gap between multi-modal fusion and omnidirectional scene perception.
10. U-RED: Unsupervised 3D Shape Retrieval and Deformation for Partial Point Clouds
In this paper, HumanTech proposes U-RED, an Unsupervised shape REtrieval and Deformation pipeline that takes an arbitrary object observation as input, typically captured by RGB images or scans, and jointly retrieves and deforms the geometrically similar CAD models from a pre-established database.
11. Annotation rules and classes for semantic segmentation of point clouds for digitalization of existing bridge structures
Germany needs to digitize its extensive bridge infrastructure using BIM due to political requirements. This transformation involves using point cloud data and exploring available open-source datasets and various approaches to semantic segmentation. HumanTech aims to bridge the gap between theoretical research on point cloud data and manual inspection by proposing a set of object-oriented classes for semantic segmentation in this study.
12. OPA-3D: Occlusion-Aware Pixel-Wise Aggregation for Monocular 3D Object Detection
Monocular 3D object detection has advanced with the use of pre-trained depth estimators for pseudo-LiDAR (Light Detection and Ranging) recovery. HumanTech proposes a method that jointly estimates dense scene depth, depth-bounding box residuals, and object-bounding boxes, enabling a two-stream detection of 3D objects.
13. Ontology-Based Semantic Labelling for RGB-D and Point Cloud Datasets
Deep learning applications have recently surged in the construction field. Supervised semantic segmentation of 2D or 3D data acquired from buildings requires using annotated data for training, validation, and testing. However, existing datasets lack a common convention and definitions based on construction ontologies. In this work, HumanTech presents a guideline for ontology-based semantic annotation of RGB-D and point cloud datasets, bridging the gap between deep learning and computer science.
14. When Machine Learning Meets Raft: How to Elect a Leader over a Network
The Raft consensus algorithm is widely used to keep data consistent across multiple distributed nodes by having a leader node coordinate operations. However, the system pauses during leader elections, which can happen if the leader fails or gets disconnected from other nodes. In this paper, Reconmatic explores using Machine Learning to monitor and classify the causes of these leader elections, aiming to reduce unnecessary elections and increase system availability.
15. Machine-learning-assisted classification of construction and demolition waste fragments using computer vision: Convolution versus extraction of selected features
Reconmatic has developed a machine-learning-assisted procedure for identifying construction and demolition waste (CDW) fragments using an RGB camera. This approach improves waste sorting efficiency and accuracy, promoting sustainable resource use and reducing environmental impact.
16. Review of Concepts for Construction and Demolition Waste and the Circular Economy
This paper, developed by Reconmatic, examines the classification and management of construction and demolition waste (CDW) and the concept of circular economy (CE) in the construction sector. Its findings can guide practical measures to enhance waste management and inform planning and decision-making for waste reduction and recovery.
17. On Using Hyperledger Fabric Over Networks: Ordering Phase Improvements
Blockchain is increasingly being used in various research disciplines, such as the Internet of Things (IoT) and Software Defined Networking (SDN). Hyperledger Fabric is a popular enterprise-grade blockchain framework known for ensuring transparency in secure communication. One of its key features is the three-phase transaction flow architecture. This study released by Reconmatic focuses on improving the ordering phase by proposing a mechanism for faster communication.
18. RoBétArmé Project: Human-robot collaborative construction system for shotcrete digitization and automation through advanced perception, cognition, mobility and additive manufacturing skills
The shortage and rising costs of skilled workers, along with the need for new infrastructure and the maintenance of ageing infrastructure, are driving an increasing demand for construction automation. The RoBétArmé project aims to revolutionize construction with advanced technologies for shotcrete (sprayed concrete) automation. This paper showcases a novel robotic system for automating all phases of shotcrete application.
19. Adaptive BIM/CIM for Digital Twining of Automated Shotcreting Process
Developing digital twins for construction requires accurately replicating real-world spaces. This study, developed by RoBétArmé, emphasizes the importance of using Building/Civil-Construction Information Modeling (BIM/CIM) to create digital twins for construction, particularly for automated shotcreting of civil infrastructure projects. It highlights the need for simulations, visualizations, and adaptive modeling to monitor and control assets in real time.
20. Leveraging Multimodal Sensing and Topometric Mapping for Human-Like Autonomous Navigation in Complex Environments
Autonomous vehicles need to understand complex outdoor environments and follow traffic rules. RoBétArmé's approach is to imitate human driver behaviour using RGB and LiDAR (Light Detection and Ranging) data combined with a rough topometric map for route planning. Their method shows potential for safer and more human-like autonomous behaviours in urban and semi-structured environments.
21. Cognitive Fusion-based Path Planning for UAV Inspection of Power Towers
The use of Unmanned Aerial Vehicles (UAV) for inspecting critical power infrastructure has advanced significantly in recent years. This paper by RoBétArmé presents a novel path planning method that leverages robot vision derived from LiDAR (Light Detection and Ranging) and RGB data for inspecting power tower insulators.
22. Comparative Study of Surface 3D Reconstruction Methods Applied in Construction Sites
This research from RoBétArmé provides a comprehensive assessment of key methodologies for 3D reconstruction of construction sites. It evaluates monocular and binocular computer vision techniques for their ability to extract detailed 3D surfaces while considering their computational efficiency. The findings contribute to advancing 3D reconstruction techniques in the construction industry, which is essential for its digitalization.
23. Real-time 3D Reconstruction Adapted for Robotic Applications in Construction Sites
Integrating robot vision techniques, especially focused on 3D reconstruction, in the construction industry is crucial to meeting the digitalization needs of Industry 4.0. This study from RoBétArmé introduces a real-time 3D reconstruction pipeline that uses both RGB and depth information using common algorithms.
Topic 3: Energy efficiency and renewable energy

24. Dynamic Energy Analysis of Different Heat Pump Heating Systems Exploiting Renewable Energy Sources
Renewable energy source-fed heat pumps (HPs) may perform up to very high efficiency standards, offering a promising tool in the broader residential heat decarbonization effort. In this context, this paper, by InCUBE, investigates different heating configurations using various renewable thermal sources and an HP-based system to find the most efficient setup. Its findings can guide the ongoing design efforts for green residential heat solutions at the research and commercial implementation levels.
25. An integrated life cycle assessment and life cycle costing approach towards sustainable building renovation via a dynamic online tool
Building stock retrofitting is crucial for achieving the building sector sustainability goals due to its high energy consumption rates. This paper by InCUBE introduces VERIFY (Virtual intEgrated platfoRm on LIfe cycle AnalYsis), an online tool for dynamic life cycle analysis and global warming impact assessments. It evaluates energy retrofitting measures for a multi-family residential building in Athens, Greece, aiming to reduce environmental impact and achieve near-zero energy consumption.
26. BIM-Based Construction Quality Assessment Using Graph Neural Networks
In this paper, HumanTech presents a novel approach for automating construction quality control. This method improves element-wise quality assessments by utilizing the semantic information in Building Information Models (BIM). The approach involves representing the as-designed Building Information Models (ad-BIM) as a graph, encoding elements' topological and spatial relationships. By using this representation, the paper proposes an algorithm based on Graph Neural Networks (GNNs) to infer element-wise built quality status.
Topic 4: Material science and design

27. Data driven design of alkali-activated concrete using sequential learning
Released by Reincarnate, this paper presents a novel approach to developing sustainable building materials through Sequential Learning. The approach can be immediately implemented in practical applications and can be translated into significant advances in sustainable building material development.
28. LLMs can Design Sustainable Concrete - a Systematic Benchmark
In the context of a circular building material economy, resource flows' complexity and material composition variability pose significant challenges. This Reincarnate study demonstrates how Large Language Models (LLMs) can advance material design by adopting a Knowledge-Driven Design (KDD) approach that outperforms traditional Data-Driven Design (DDD) methods.
29. Beyond Theory: Pioneering AI-Driven Materials Design in the Sustainable Building Material Lab
This work, by Reincarnate, focuses on using Artificial Intelligence (AI)-driven materials design to improve the sustainability of building materials with complex formulations. It provides insights into the real-world application of data-driven design, showcasing the successful integration of AI to advance sustainable materials science and boost sustainable building in the construction industry.
30. 14 Examples of How LLMs Can Transform Materials Science and Chemistry: A Reflection on a Large Language Model Hackathon
Large-language models (LLMs) such as GPT-4 have garnered interest from scientists for their potential in chemistry and materials science. Reincarnate organized a hackathon that showcased various LLM applications, including predicting molecule and material properties, designing novel tool interfaces, and extracting knowledge from unstructured data. This demonstrates the broad impact of LLMs across scientific disciplines beyond materials science and chemistry.
Share these research developments with your network!
Use our hashtag #Tech4EUConstruction on social media.

HumanTech's year 2 in review: A year of hard work and remarkable advances
As we conclude our second year at HumanTech, we have taken the chance to reflect on a period marked by significant achievements and progress in our mission to drive the digitalisation of the construction sector with cutting-edge, human-centred technologies. This year, we have reinforced our core values: collaboration, innovation, and scientific excellence, achieving milestones that push the boundaries of what is possible in construction technology.
Parallel to our continuous advancements in the scientific field, this year also saw the consolidation of our partner's individual results into integrated systems, which resulted in impressive demonstrations.
Milestones and achievements
A successful Mid-Term Review Meeting
A key milestone for the project was our 18-month periodic reporting and review, hosted by IMPLENIA in Zurich in January 2024. The event was unanimously a great success, validated by the entirely positive feedback we received.
The highlight of the review was the closing demo session, featuring live demonstrations of:
- Autonomous site scanning with an unmanned ground vehicle (UGV) by ZHAW
- Localisation and worker body pose tracking with a head-mounted camera and inertial sensors by SciTrack and RICOH
- Automated Scan-to-BIM pipeline by RPTU and DFKI
- Object Pose estimation for robotic grasping by DFKI

Progress in robotics and AI technologies continues
In the following months, we witnessed additional significant progress in bringing robotic and AI technologies to the construction industry. These results were shown primarily in two events: the HumanTech Executive Board Meeting in Genova, organized by STAM, and our Robotic Integration Hackathon, hosted in Madrid at ACCIONA’s construction test site.
During the hackathon, project partners had the first opportunity to test and integrate their components on the newly created BAUBOT robotic platform for HumanTech.
Some key results shown in these two events were:
- Robotic grasping and handover of materials (SINTEF, TECNALIA, BAUBOT, DFKI, ACCIONA)
- Teleoperated mastic application (TECNALIA, SINTEF, BAUBOT, ACCIONA)
- BIM visualization overlaid over real building in XR (HOLOLIGHT)

Demonstrating scientific excellence
During this period, our commitment to scientific excellence has been recognised through numerous awards and publications at major conferences:
- 1st place awards in 3 categories in the Benchmark on Object Pose challenge 2023 at the ICCV 2023 conference
- 3 rd place in the Scan-to-BIM challenge of the CVPR 2023 conference
- 8 scientific publications, among others, in the prestigious CVPRx2, ICCVx1, and WACVx1 conferences
An equally important part of HumanTech’s mission is actively engaging with different communities in the construction field and disseminating our project results. For the second year in a row, we co-organized, along with the Tech4EUconstruction cluster, a highly successful “AI and Robotics in Construction” workshop at the European Robotics Forum (ERF) 2024 in Rimini.

HumanTech resources available
Recently, we have made several resources from our project openly available to everyone through our website. These include all the public deliverables from the first 18 months of the project, source code repositories for many of our scientific publications, our micro-learning units, and a variety of datasets that will be enriched and extended in the future.
Looking ahead
We are not done just yet!
We still have another whole year ahead with one main challenge: Implementing our 5 project pilots! We will do it across diverse settings (office buildings, bridges) and countries (Spain, Switzerland, Germany, Singapore) between the end of 2024 and the beginning of 2025.
This article has been written by Jason Rambach, HumanTech’s Project Coordinator and Senior Researcher and Team Leader in Spatial Sensing and Machine Perception at the German Research Center for Artificial Intelligence (DFKI) in Kaiserslautern, Germany. Learn more about him in this interview.
To stay updated, follow our news and social channels (LinkedIn, Twitter and YouTube) and subscribe to our newsletter.