Between 13 and 31 January 2025, HumanTech project partners gathered at ACCIONA Construction’s demo site in Madrid to integrate and test our robotics and wearables system for collaborative bricklaying. This is one of the technologies we have developed as part of our broader mission to digitalise the construction sector and make it safer and more efficient.
The goal for this session was to demonstrate two innovative technologies for assisting bricklayers at construction sites:
- An active exoskeleton that supports workers during heavy lifting, particularly at or above shoulder height.
- A robotic brick-handover system that can detect and grasp bricks from a stack and hand them to the worker.
This pilot — one of our five HumanTech Pilots — represents a key milestone in our efforts to enhance safety and efficiency in construction processes through human-robot collaboration, setting the stage for a smarter and more ergonomic approach to bricklaying.
Explore insights from the team behind its development:
The pilot’s main objective
Fabian Kaufmann, Researcher at RPTU
The human workforce will be present on construction sites at least in the mid-term, and likely even in the long-term. Therefore, robotic systems must be able to co-exist with humans on-site. This pilot aims to demonstrate human–robot collaboration enabled by advanced perception and control algorithms. In an integrated bricklaying scenario, our robot hands over bricks, picked up from a pallet, to the worker, and the worker is supported by an on-demand activated exoskeleton to assist with physically demanding tasks.
“This pilot aims to demonstrate human–robot collaboration enabled by advanced perception and control algorithms.”
Transforming Bricklaying: How Technology is Empowering Workers
Anurag Bansal, Head of Strategic Innovations at ACCIONA
This pilot could be a game-changer for the industry. As a construction company committed to innovation, we were excited to see HumanTech’s robotics and wearables system for collaborative bricklaying in action at Acciona. These technologies have the potential to transform the way we work — making construction safer, more efficient, and sustainable.
The active exoskeleton provided much-needed support for workers lifting heavy materials at or above shoulder height, reducing strain and fatigue. Meanwhile, the robotic brick handover system seamlessly detected, grasped, and passed bricks to workers, improving workflow and minimising downtime.
Seeing these solutions firsthand reinforced the idea that automation isn’t about replacing workers — it’s about empowering them. If widely adopted, this technology could revolutionise construction sites, enhancing productivity while prioritising worker well-being. This is a major step towards a smarter, safer future for the industry.
“If widely adopted, this technology could revolutionise construction sites, enhancing productivity while prioritising worker well-being.”
Gabor Sziebig, Research Manager at SINTEF
Statistics and analyses show that the construction industry faces many challenges: slow adoption of new technologies, high injury rates, low productivity, and a decline in recruiting skilled workers. I believe construction sites will change significantly in the coming years.
Looking five years ahead, I think the most modern construction sites will be adapted for robots. Initially, it is natural to imagine them operating on site when human workers are not present. If humans work two shifts, robots can take the third. It will begin with simple tasks — robots that paint or transport materials already exist, and Norwegian companies are already using drilling robots. Robots inspecting the construction site during off-hours is also easy to envision.
Over time, robots will increasingly work alongside construction workers and engineers on-site, as we have demonstrated in this pilot.
“Over time, robots will increasingly work alongside construction workers and engineers on-site, as we have demonstrated in this pilot.”
Use case 1: Robotic collaboration for brick handover
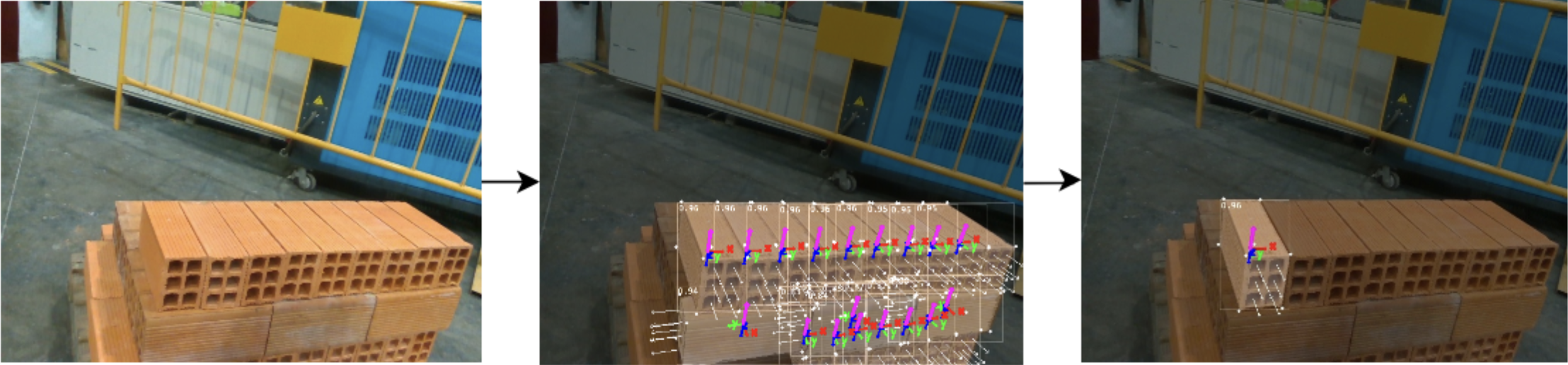
Brick pose estimation and best candidate selection
Sai Srinivas Jeevanandam, Computer Vision Researcher at DFKI
For the robot to effectively pick up bricks, it must understand two critical aspects: (1) the poses of the bricks — including their precise location and orientation in the environment — and (2) which brick to select for grasping. We at DFKI have developed ZebraPose, a state-of-the-art, in-house deep learning algorithm designed to predict poses directly from a single image.
Recognising the novelty of this task and the limited availability of relevant real-world data, we created a synthetic dataset consisting of rendered images of brick stacks. These synthetic images were specifically designed to replicate real-world brick arrangements. We used this dataset to train our deep learning model, enabling it to predict brick poses accurately. By leveraging synthetic data, we eliminated the need for time-consuming and error-prone manual annotation, significantly accelerating the model development process.
In addition to pose estimation, we developed a robust best-candidate selection algorithm. Given the poses of all bricks in a stack, this algorithm evaluates each one and selects the most suitable candidate for the robot to grasp.
Finally, we packaged everything into an end-to-end pipeline with an API interface for easy integration. This pipeline is designed to operate in real time, making it suitable for deployment on edge devices such as the NVIDIA Jetson, where computational resources are limited.
Mobile robotic system
Joseph Thomas Thekkekara, Technical Project Manager at BAUBOT
BAUBOT provided a collaborative mobile demonstrator platform based on a modular concept, built from scratch for HumanTech. This system can support a wide range of external robotic applications, particularly those related to the construction industry.
It was designed with external software and hardware interfaces to facilitate the integration of external robotic applications into the existing robotic architecture.
Use case 2: Wearables for supported bricklaying
Intelligent exoskeleton with intention prediction
Alfonso Domínguez, Senior Researcher at Tecnalia

Within the HumanTech project, Tecnalia has introduced the first prototype of an advanced upper-limb exoskeleton. The decision to focus on the upper limbs stems from the fact that shoulders, along with the back, are among the most affected body regions in construction due to the physically demanding nature of the work.
What makes this exoskeleton unique is its ability to activate based on the user’s intent, inferred from their kinematics using data from a Body Sensor Network (BSN). Its main goal is to reduce physical strain and minimise effort for the worker, while providing a more intuitive and less intrusive user experience. By simplifying its operation, the system also reduces the mental effort needed to control the exoskeleton, making it a seamless extension of the worker’s natural movements.
“What makes this exoskeleton unique is its ability to activate based on the user’s intent, inferred from their kinematics using data from a Body Sensor Network (BSN).”
Mobile magnetometer-free inertial tracking
Markus Miezal, CEO and Co-Founder of Sci-track
As support for the exoskeleton, Sci-track provides its magnetometer-free inertial tracking approach, executed on-body using a Xenoma e-skin suit. The suit features very flat IMUs integrated into a tight full-body suit that can be comfortably worn beneath protective clothing.
Usually, inertial sensors include a magnetometer — a 3D compass used to measure the local magnetic field and determine yaw direction. While this sensor is designed to point towards magnetic north, it can easily be disrupted. Metal structures, power tools, and motors — all common on construction sites — influence the Earth’s magnetic field locally, resulting in inaccurate readings. Our approach eliminates the use of magnetometers, relying instead on motion-based intrinsic alignment.
Additionally, our algorithms can run on a body-worn, mobile phone-sized computer. This ensures timely communication with the exoskeleton and enhances privacy, as the data never leaves the wearer.
This pilot showcases how human-robot collaboration can transform physically demanding construction tasks into safer, more efficient, and more sustainable processes. By combining robotics, wearables, and intelligent algorithms, HumanTech is paving the way for a more resilient and future-ready construction industry.
Learn more about how our human-centred innovations are contributing to a safer, more efficient, and technology-driven construction by following our news and social channels (LinkedIn, Twitter and YouTube) and subscribing to our newsletter!